Come descritto nel precedente articolo in cui si è parlato dei principi fisici della PET, attraverso la rilevazione della posizione dell’interazione dei due fotoni di annichilazione, è possibile definire una linea, chiamata linea di risposta o LOR. Si suppone che la posizione dell’evento di annichilazione si verifichi lungo questa linea. Il problema è quindi riconoscere una coppia di fotoni come generati dallo stesso processo di annichilazione. Ciò può essere fatto sfruttando le informazioni fornite dal tempo di arrivo di un γ-ray nel rivelatore. I due fotoni vengono generati simultaneamente e quindi, trascurando il ritardo che può verificarsi a causa di una differenza di distanza dal punto di annichilazione ai due rivelatori e considerando che viaggiano alla velocità della luce, vengono rilevati contemporaneamente.
Chiamiamo rivelazione di coincidenza il processo di selezione della coppia di γ-ray di annichilazione utilizzando le informazioni sull’orario di arrivo. L’evento associato all’occorrenza di una rivelazione di coincidenza di due fotoni è chiamato evento di coincidenza, mentre in un singolo evento, viene rilevato solo un γ-ray. Per questo motivo, la determinazione del momento in cui un fotone ha colpito un rivelatore è un passaggio critico nel processo di rivelazione PET. Dopo aver ottenuto queste informazioni, il tempo di tutti gli eventi rilevati può essere confrontato per determinare quali sono arrivati abbastanza vicini nel tempo da essere identificati come una coppia di annichilazione.
La capacità di una coppia di rivelatori di determinare la differenza di tempo di arrivo dei fotoni di annichilazione è nota come risoluzione temporale ed è tipicamente nell’intervallo da poche centinaia di picosecondi a pochi nanosecondi. La differenza massima di tempo per una coppia di fotoni rilevati da identificare come un evento di coincidenza è chiamata finestra temporale o τ. Per evitare di perdere eventi di coincidenza, la finestra temporale è di solito più grande di due volte la risoluzione temporale (ad esempio, 2-3 ns utilizzando LSO: Lutetium oxyorthosilicate).

Sistema di acquisizione dati
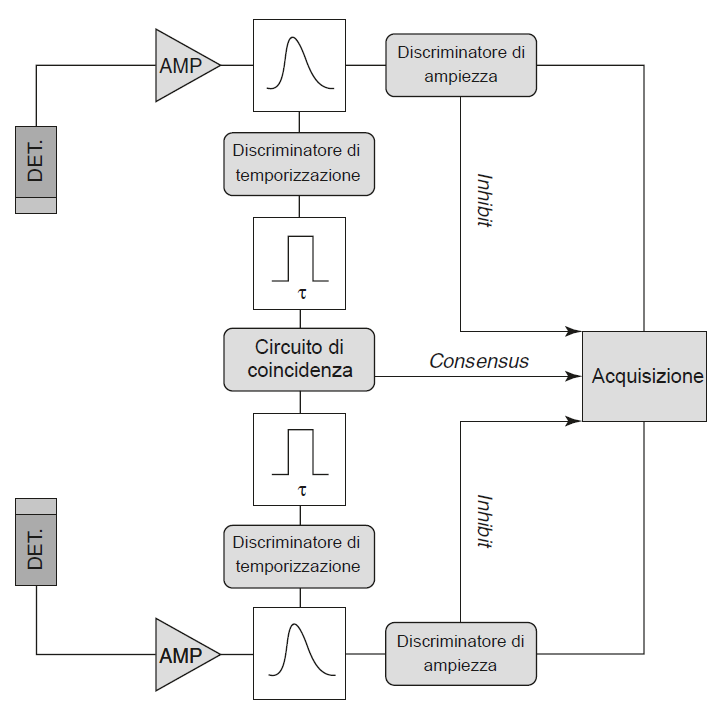
Nella sua forma più semplice, un sistema di acquisizione dati PET ha una struttura a due rami: un circuito di temporizzazione fornisce le informazioni di coincidenza e consente di acquisire i dati sui rivelatori coinvolti, mentre un circuito di raccolta dati converte i segnali di posizione ed energia in valori digitali.
L’immagine a sinistra illustra l’acquisizione dati PET per un sistema a due rivelatori semplificato. Lungo il ramo di temporizzazione, il segnale del tubo fotomoltiplicatore passa attraverso un amplificatore veloce (per preservare le informazioni temporali) ed entra in un discriminatore che produce un segnale digitale quando viene rilevato un γ-ray con energia rilasciata sufficiente. La larghezza del segnale digitale generato è impostata per essere uguale alla finestra temporale τ.
Per migliorare la risoluzione temporale, viene utilizzato un discriminatore a frazione costante (CFD). Il CFD è un dispositivo che produce un timestamp quando il segnale raggiunge una frazione del suo massimo (anziché un valore di ampiezza fisso come nei discriminatori temporali standard), evitando così errori sistematici di misurazione del tempo (chiamati time walk) quando segnali di ampiezze diverse vengono elaborati.
Gli impulsi di temporizzazione vengono alimentati in un circuito di coincidenza che, attraverso una serie di porte logiche (una semplice porta AND nel caso di un sistema a due rivelatori), identifica coppie di segnali che presentano una certa sovrapposizione temporale (coincidenza temporale). In questo modo, una coincidenza viene accettata quando la differenza di tempo è compresa tra -τ e +τ. Pertanto, la finestra effettiva di coincidenza temporale è effettivamente di 2τ.
La rilevazione di un evento di coincidenza consente l’acquisizione di segnali di energia e posizione solo dei blocchi coinvolti, lungo l’altro ramo. L’estensione di questo concetto a un sistema a più rivelatori può essere ottenuta implementando un circuito di coincidenza più complesso.

La geometria di un sistema PET
I rivelatori PET sono solitamente posizionati intorno all’oggetto in studio nella cosiddetta geometria ad anello. In questo modo, viene raccolto un insieme completo di integrali di linea definite dalle possibili linee di risposta (acquisizione tomografica), campionando quindi l’oggetto lungo le coordinate spaziali e angolari.
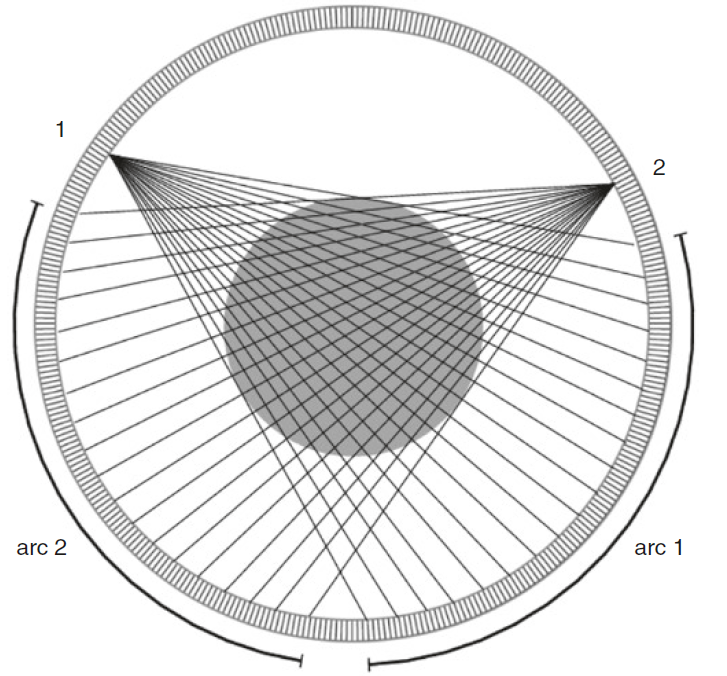
Ogni rivelatore può accettare una coincidenza con qualsiasi rivelatore appartenente ad un arco opposto di rivelatori, definendo così una sorta di cuneo. L’intersezione di tutti i cunei è un cerchio centrato sull’asse dello scanner che rappresenta il campo visivo (FOV) del sistema PET. Quindi, un PET a singolo anello è in grado di fornire immagini di sezioni dell’oggetto con un’estensione assiale pari alla dimensione del rivelatore lungo l’asse dell’anello.
Per aumentare le dimensioni del FOV lungo le direzioni assiali, i moderni sistemi PET presentano più anelli (geometria multi-anello) con un’estensione assiale tipica di 15-20 cm.
Da PET 2D a PET 3D
I sistemi PET multi-anello sono classificati in due categorie: scanner 2D e 3D. Nella PET 2D, le coincidenze tra rivelatori appartenenti a due anelli diversi non sono consentite. Questa semplificazione rende il processo di ricostruzione dell’immagine più semplice. Inoltre, ogni anello è fisicamente separato dall’anello adiacente con un settore realizzato in un materiale ad alto numero atomico, al fine di limitare il numero di singoli eventi che raggiungono un singolo rivelatore.
L’avvento di algoritmi di ricostruzione più avanzati e hardware più potenti ha reso possibili gli scanner PET 3D, in cui le coincidenze tra anelli adiacenti vengono anche registrate. Il principale vantaggio della modalità 3D rispetto alla PET 2D è la maggiore sensibilità del sistema con un aumento massimo del numero di anelli. Ad oggi, tutti i sistemi PET clinici presentano la modalità 3D come impostazione predefinita.

Questioni sulla risoluzione spaziale: Limitazioni fisiche ed aspetti tecnologici
La fisica del decadimento β+ e la conseguente annichilazione positrone-elettrone rappresentano le prime limitazioni nella risoluzione spaziale della tecnica PET. Infatti, la portata media (nell’acqua o in altri materiali equivalenti al tessuto) dei positroni emessi dalla maggior parte dei radionuclidi PET è di circa 1-2 mm. Oltre alla portata del positrone, la non collinearità influisce anche sulla risoluzione spaziale di un sistema PET. Supponendo che la misurazione PET venga eseguita con un anello di rivelatori di diametro D, l’effetto sulla risoluzione spaziale PET può essere espresso dalla formula empirica:
FWHM = 0.0022 x D

La migliore risoluzione spaziale ottenibile è limitata anche da altri fattori legati al processo di rivelazione e alla tecnologia in uso. In generale, la risoluzione spaziale di un sistema PET non è costante lungo l’intero campo visivo (FOV). Questo fatto è legato alla geometria di un sistema PET che non campiona tutte le linee di volo allo stesso modo.
La degradazione della risoluzione spaziale è essenzialmente dovuta all’incertezza nella determinazione della linea di volo (LOF) che dipende da fattori legati sia alla geometria del rivelatore sia alla fisica del processo di rivelazione. Quando viene rilevata una coincidenza, una coppia di cristalli definisce la LOR. A causa delle dimensioni finite dei rivelatori, la LOR non è effettivamente una linea ma una regione dove l’annichilazione ha una certa probabilità non nulla di essere avvenuta. Questa probabilità è descritta da una funzione di risposta alla coincidenza.
Per una coppia di elementi di cristallo, la FWHM della funzione di risposta alla coincidenza nel piano mediano tra i rivelatori è uguale alla metà delle dimensioni del cristallo (d) lungo la stessa direzione e peggiora avvicinandosi a uno dei due rivelatori. Quindi, il contributo (in termini di FWHM) alla risoluzione spaziale dovuto alle dimensioni finite del cristallo è minimo al centro del FOV ed è pari a d/2. Quando i cristalli in una matrice sono separati da un materiale riflettente di spessore non trascurabile, il valore d è effettivamente il passo del cristallo, cioè la distanza tra i centri degli elementi di cristallo adiacenti. Poiché i cristalli che definiscono la LOR non sono allineati, lo spessore finito dei cristalli entra in gioco, poiché tipicamente nessuna informazione sulla profondità di interazione (DOI) viene fornita. Questo fatto introduce un ulteriore contributo alla FWHM che è di solito indicato con la lettera p e viene chiamato errore di parallasse.
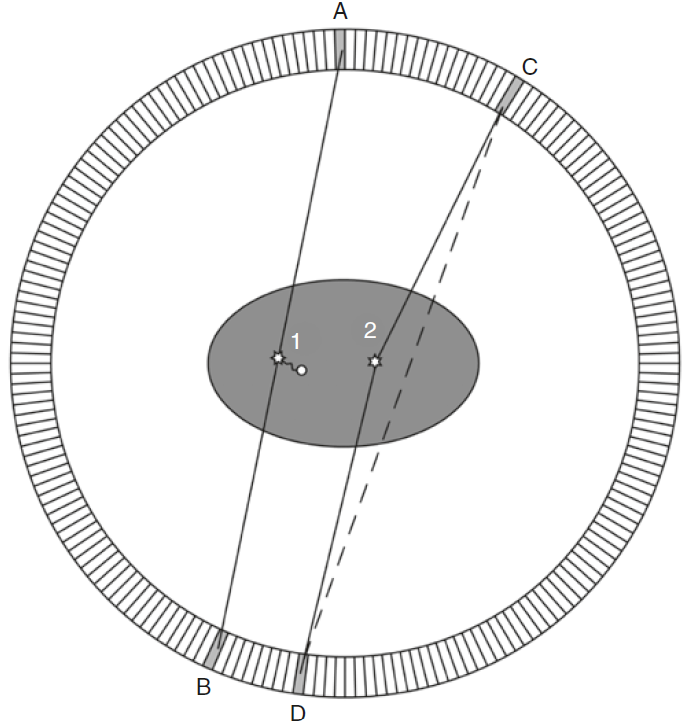
Nel caso 1, il positrone si allontana dal punto di emissione prima di annichilirsi, e i fotoni ad alta energia emessi vengono quindi rilevati da due rivelatori A e B. La LOR derivata passa dal punto di annichilazione ma non dal punto in cui il nucleo radioattivo era effettivamente presente.
Nel caso 2, è possibile apprezzare come la rilevazione di due fotoni ad alta energia non emessi esattamente a 180° generi una LOR (definita dai rivelatori C e D) che non attraversa il punto di annichilazione.
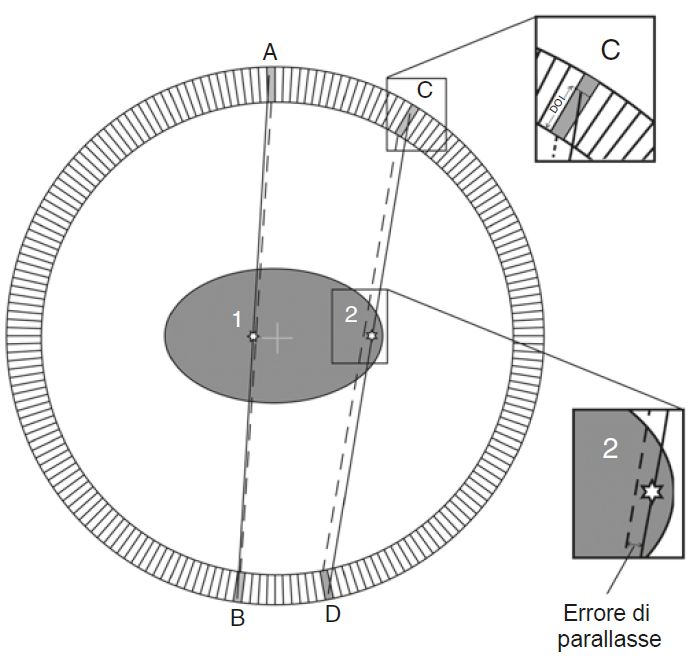
Nel caso 1 i due fotoni ad alta energia raggiungono i rivelatori lungo una direzione parallela all’asse lungo dei cristalli (interazione a 0°): l’errore di parallasse è minimo in questo caso, indipendentemente dalla profondità delle interazioni. Quindi, la LOR passa molto vicino al punto di annichilazione.
Nel caso 2, i fotoni ad alta energia raggiungono i rivelatori con un angolo significativamente maggiore di 0°: si verifica un errore di parallasse maggiore (la LOR passa a una certa distanza dal punto di annichilazione), specialmente quando l’interazione avviene in profondità nel cristallo.

In sistemi PET con geometria ad anello, l’errore di parallasse ha un effetto significativo lungo la direzione radiale, risultando in una sorta di allungamento radiale delle immagini. La risoluzione radiale peggiora muovendosi lontano dal centro del FOV. Infatti, il contributo alla FWHM della PSF lungo la direzione radiale può essere approssimato dalla seguente equazione:
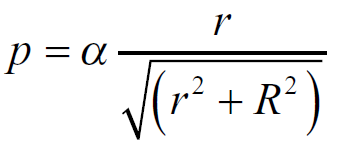
dove r è la posizione radiale in cui viene derivata la PSF, R è il raggio dell’anello PET e α è un termine che dipende dal materiale e dalla spessore dei cristalli di scintillazione. Per esempio, α = 12.5 per un cristallo di BGO (bismuth germanate) spesso 30 mm.
Inoltre, possono verificarsi anche degli errori nell’associare il punto di interazione a un determinato elemento del cristallo. Questo processo è chiamato identificazione del cristallo (o pixel) e può essere eseguito in diversi modi. Il più comune è calcolare il centroide della macchia di luce che emerge dal cristallo e confrontare la posizione calcolata con una tabella di lookup pre-calcolata in cui le posizioni sono associate agli elementi del cristallo. La fonte di questo errore è duplice: potrebbe esserci un errore possibile nel processo di identificazione del cristallo stesso e c’è la possibilità che si verifichino interazioni multiple nel cristallo di scintillazione.
Quando si verifica l’interazione multipla nel cristallo coinvolgendo più di un elemento del cristallo, l’evento è chiamato scatter inter-cristallo (ICS). I contributi sia dell’identificazione del cristallo che degli effetti di ICS sono inclusi nel cosiddetto termine di errore di codifica (b).
La migliore risoluzione spaziale ottenibile in PET può essere riassunta con la seguente formula che tiene conto sia degli effetti fisici che delle limitazioni tecnologiche:

dove 1.25 è un termine legato al processo di ricostruzione dell’immagine e viene stimato assumendo un algoritmo di ricostruzione analitica come la retroproiezione filtrata. Gli altri fattori sono la dimensione del rivelatore (d), l’errore di codifica (b), il termine di non-collinearità (dove D è il diametro dello scanner), la portata del positrone (r), e l’effetto parallasse (b).
I moderni sistemi clinici PET presentano una risoluzione spaziale di circa 4 mm FWHM. I fattori predominanti sono la non-collinearità e la dimensione del pixel, mentre il fattore di portata del positrone r potrebbe diventare importante per emettitori di positroni ad alta energia come il 68Ga.

Il rumore negli eventi PET
Le caratteristiche del rumore hanno importanti implicazioni per la quantificazione dell’immagine e le prestazioni di rilevamento nella PET, specialmente negli scanner ad alta risoluzione.
L’efficienza di rilevamento D si riferisce all’efficienza con cui un rivelatore converte le emissioni dalla sorgente di radiazione in dati utili e può essere definita come D = R/A, dove R è il conteggio di rilevamento e A è l’attività della sorgente. Un’elevata efficienza di rilevamento è desiderabile per ottenere un’immagine con un minimo di rumore statistico con una quantità minima di radioattività (riduzione della dose).
Le statistiche di conteggio sono solo uno dei fattori nella PET che determinano un aumento del rumore nell’immagine (o, più correttamente, un aumento della ruvidità dell’immagine) che sono legati sia alla fisica dell’interazione dei γ-ray con la materia che alla tecnologia del rivelatore. Un modo per osservare questo effetto è valutare l’uniformità di una sorgente di radiazione uniforme in termini di deviazione standard del valore misurato.
Oltre alle limitazioni statistiche già discusse, l’uniformità è influenzata dalla presenza di linee di risposta (LOR) non registrate in modo appropriato, ovvero non generate da un conteggio vero. Un conteggio vero è un evento di coincidenza con entrambi i fotoni di annichilazione rilevati senza subire altre interazioni lungo il loro percorso. In queste condizioni, la LOR passa attraverso il punto di annichilazione.
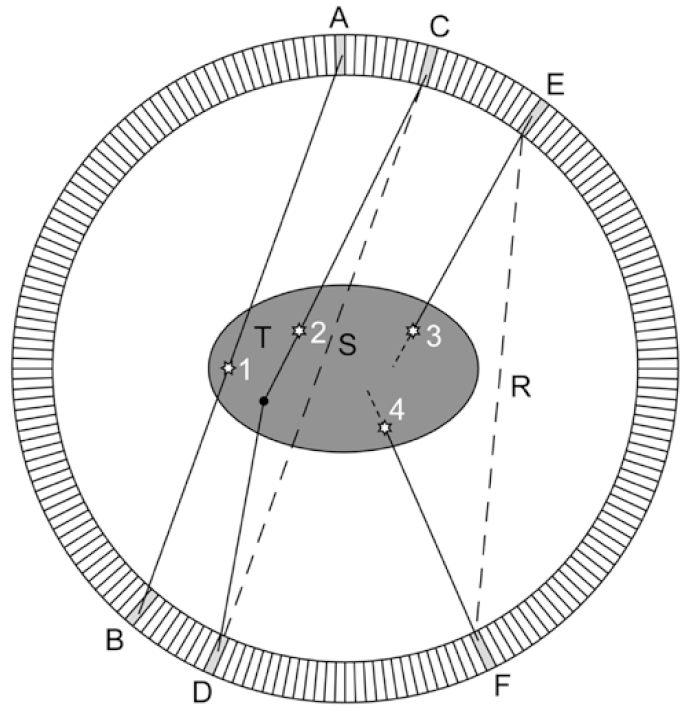
In realtà, non tutte le LOR registrate sono generate da conteggi veri. La figura accanto mostra quattro possibili tipi di eventi di coincidenza che possono essere registrati durante una scansione PET.
L’evento che ha origine nel punto 1 corrisponde a un conteggio vero (T) tra i rivelatori i e j, generando quindi un conteggio nella LORij. Invece, almeno uno dei due fotoni γ emessi dalla posizione 2 subisce uno scattering Compton lungo il suo percorso, e il conteggio corrispondente nella LORkl considera un’annichilazione che non avviene lungo la stessa linea di risposta. Questo tipo di evento è chiamato conteggio scatter (S). Un terzo tipo di evento è chiamato conteggio random (R). È generato quando due fotoni vengono emessi da due punti diversi (ad esempio, i punti 3 e 4 nella figura), e vengono registrati, in coincidenza temporale, nei rivelatori che definiscono una LOR geometricamente accettabile. Tutti i tipi di conteggi T, S e R sono genericamente chiamati conteggi prompt (P), ma solo i conteggi veri contengono informazioni utili per la ricostruzione dell’immagine.
Un tipo aggiuntivo di evento è un conteggio multiplo, in cui più di due fotoni γ vengono registrati in coincidenza temporale. A causa dell’ambiguità nel decidere quali siano i due fotoni effettivamente generati in un’unica annichilazione, questo tipo di evento deve essere scartato. Il peso relativo dell’effetto degli eventi dispersi sull’immagine finale è indicato dalla frazione di scattering (SF), definita come:
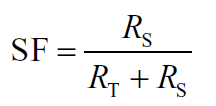
La frazione di scattering può essere ridotta scartando alcuni degli eventi di scattering. Un evento di scattering può essere rigettato utilizzando le informazioni sull’energia, cioè solo i fotoni che rilasciano 511 keV nel cristallo vengono accettati come segno di assenza di interazione del fotone γ prima di raggiungere il rivelatore. La capacità del rivelatore di determinare l’energia del fotone è nota come risoluzione energetica. I valori tipici della risoluzione energetica per il rilevamento di LSO da parte dei PMT sono del 15-20% a 511 keV. A causa del valore finito della risoluzione energetica del rivelatore, non è possibile accettare eventi con un rilascio di energia esattamente di 511 keV, ma dovrebbe essere impostata una finestra energetica più ampia, tipicamente 450-650 keV nei sistemi clinici.
Tuttavia, quando si imposta una finestra energetica intorno al picco energetico completo, una frazione degli eventi di scattering è ancora inclusa. I valori tipici della frazione di scattering in PET possono variare tra il 15% e il 20% fino al 50% nei pazienti obesi.
Per questo motivo, sono stati sviluppati e applicati una serie di metodi per correggere l’effetto degli eventi di scattering sulla degradazione della qualità dell’immagine prima o durante il processo di ricostruzione. Sono solitamente classificati con il termine “correzione dello scattering” e utilizzati per ripristinare il contrasto dell’oggetto nell’immagine finale.
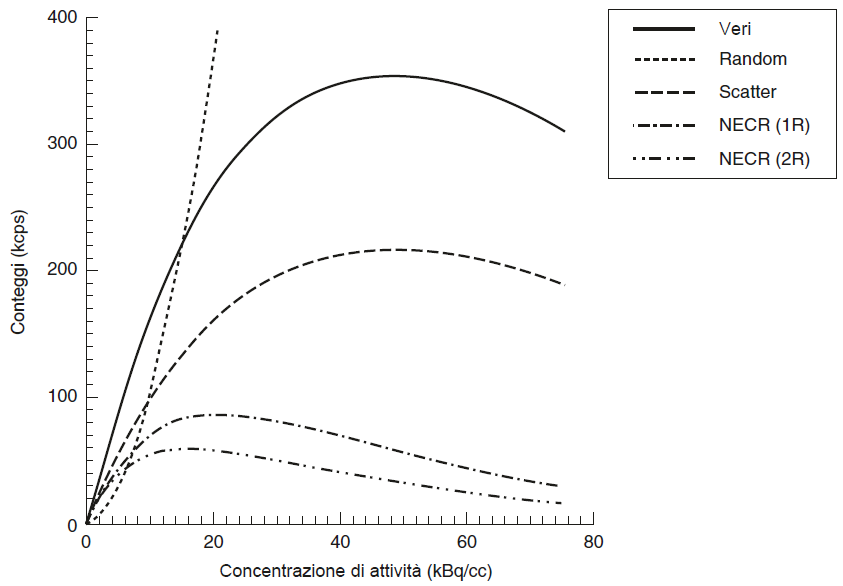
Anche gli eventi casuali contribuiscono alla degradazione dell’immagine generando uno sfondo più uniforme rispetto ai conteggi di scattering. Mentre la frazione di scattering è quasi costante con l’attività, il tasso di conteggio casuale aumenta con il quadrato dell’attività, e la qualità dell’immagine viene ridotta all’aumentare dell’attività. Infatti, il tasso di conteggio casuale può essere espresso come:
Rij= Ci x Cj x 2τ
dove Ci e Cj sono il tasso di conteggio singolo sui rivelatori i e j e τ è la finestra temporale di coincidenza. Pertanto, una finestra temporale stretta aiuta a ridurre l’effetto dei conteggi casuali.
Il tasso di conteggio equivalente al rumore (NECR) è una figura di merito che quantifica l’ammontare di rumore di fondo e di rumore statistico caratteristico di un determinato scanner PET, valutando così l’effetto della presenza di conteggi dispersi e casuali.
La formulazione del NECR è la seguente:
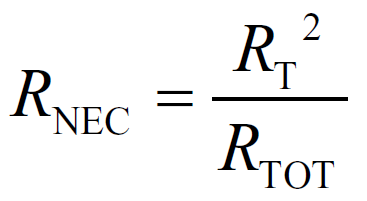
dove RTOT è la somma dei tassi di conteggio veri (RT), casuali (RR) e di scattering (RS):
RTOT = RT + RS + kRR
Dove k è un fattore che tiene conto del metodo utilizzato per stimare i conteggi casuali, di solito k > 1, mentre k = 1 per i conteggi casuali privi di rumore. Essendo NECR proporzionale al rapporto segnale-rumore (SNR) nelle immagini finali ricostruite, costituisce un buon parametro per confrontare le prestazioni dei diversi scanner PET e per stimare l’attività ottimale da iniettare al paziente.
L’immagine in basso mostra esempi di curve vere, di scattering, random e NECR in funzione della concentrazione di attività.
Fonte: Fondamenti di medicina nucleare. Tecniche e applicazioni.